
Volume 169
Published on July 2025Volume title: Proceedings of CONF-MSS 2025 Symposium: Machine Vision System

This paper introduces the design and analysis of a novel tri-layer granular jamming gripper, developed to address the performance limitations of traditional granular jamming grippers in intelligent soft robotics. While universal grippers offer adaptability and flexibility in grasping a wide range of objects, they suffer from constraints such as limited load capacity, insufficient shape adaptability, and challenges in handling smooth or irregular surfaces. The proposed tri-layer gripper introduces an intermediate airbag layer between the rigid outer shell and the granular medium, allowing enhanced conformability and grip strength through active air inflation. To evaluate the performance of the tri-layer gripper, comparative experiments were conducted against a conventional granular jamming gripper, serving as a control. The experiments included grasping tests with objects of varying shapes, sizes, surface properties, and gripping force measurements. Results demonstrate that the tri-layer gripper consistently outperforms the traditional gripper, particularly in handling smooth and irregularly shaped objects, providing a firmer and more stable grip. The airbag’s ability to increase contact area and apply lateral pressure significantly improves both load-bearing capacity and overall adaptability. Despite these advancements, current limitations include the rudimentary nature of the materials used, inefficiencies in the inflation mechanism, and constraints on size scalability. Future improvements could focus on optimizing material selection, refining manufacturing techniques, and integrating more intelligent control systems for enhanced precision and adaptability. The findings of this study contribute to the advancement of intelligent soft robotic gripping technologies, paving the way for more efficient and versatile robotic manipulation in real-world applications.



This article provides a comprehensive review of the development of wearable devices in the field of healthcare. Key technologies such as sensor technology (e.g. electrochemistry, optics, etc.), micro-electro-mechanical systems (MEMS), flexible electronics, and material innovation are described in detail, power and energy management strategies, signal processing and data analysis methods are discussed. The clinical applications of wearable devices in diabetes management, cardiovascular disease monitoring and sleep monitoring are discussed, and their effectiveness and challenges are assessed. In addition, existing technical, clinical, and market challenges are analyzed, and future trends such as multimodal sensor fusion, intelligence, miniaturization, and integration with emerging technologies are predicted. Overall, this paper presents the current status of wearable devices in the field of healthcare in an all-round way, and provides ideas for subsequent research and development.
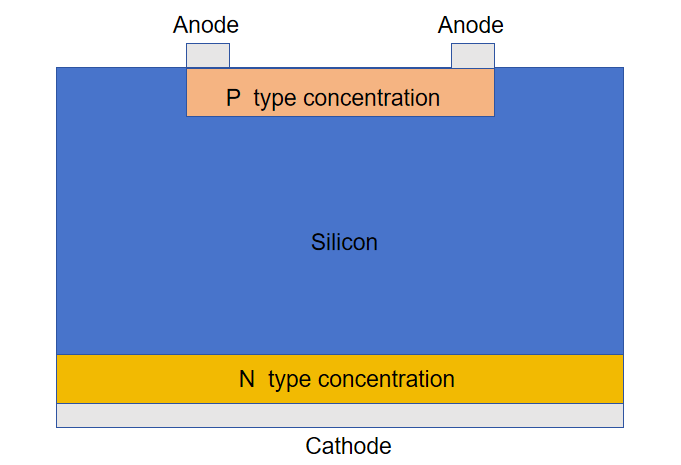
This research, based on Silvaco software, aims to investigate the operational characteristics of PIN photodetectors under different lighting conditions, in particular the current response in both dark and illuminated states. The behaviour of the PIN photodetector under reverse bias is simulated, with particular emphasis on the effect of the optical wavelength on the device response. The development history of the PIN photodetector is first reviewed, followed by a detailed analysis of its basic operating principles. Using Tonyplot simulations, the current response of the PIN photodetector under various reverse bias voltages is examined, with particular emphasis on its high-impedance characteristics in the dark state. Further experiments show that the PIN detector has the best photoelectric conversion efficiency and the strongest response in the green light wavelength range around 0.5μm. Finally, the distribution of electric potential and field inside the device confirms the accuracy and efficiency of the PIN detector's operating mechanism, where light excitation generates charge carriers. This provides a theoretical basis and data support for the operation of the PIN photodetector within a specific wavelength range.
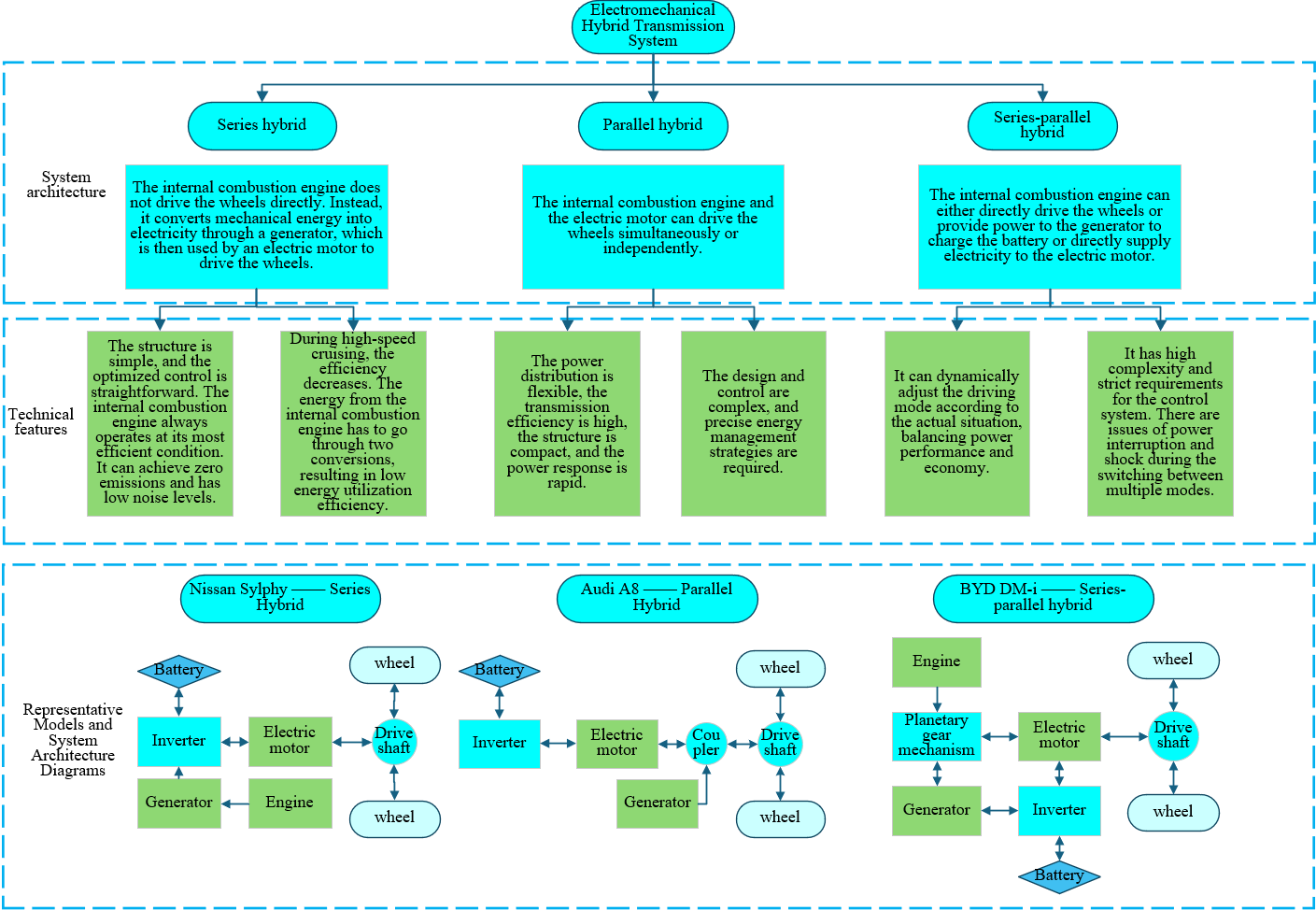
With the rapid development of intelligent vehicles and the global push for carbon neutrality, Electromechanical Transmission (EMT) systems have attracted wide attention for their unique benefits. This paper provides an in-depth analysis of the three primary EMT architectures—series, parallel, and series-parallel hybrid configurations—highlighting their structural characteristics and operational principles. The study identifies key research directions focusing on enhancing energy utilization efficiency, improving drivability, and reducing system costs. Furthermore, it examines the current applications of EMT systems in intelligent vehicles, delineates the challenges encountered, and explores critical technologies such as lightweight design, hybrid power cooperative drive, and intelligent control strategies. The paper also evaluates various methodologies and algorithms employed within these technologies, assessing their respective advantages and limitations. Looking ahead, EMT systems are poised to play an increasingly pivotal role across multiple domains. However, to fully realize their potential, it is imperative to address prevailing issues related to system reliability, cost-effectiveness, and the integration of advanced intelligent control mechanisms, thereby contributing to the sustainable development of the automotive industry.

Microgrippers require adaptive stiffness control to manipulate objects with varying mechanical properties, yet conventional variable-stiffness mechanisms face limitations in structural complexity, scalability, and hysteresis-induced inaccuracies. This study proposes a bidirectional microgripper that achieves stiffness modulation via material reconfiguration instead of actuator-dependent strategies. The design integrates a hybrid architecture combining a rigid aluminum alloy and a compliant silicone elastomer on opposing gripping surfaces. By rotating the jaw 360 degrees along a circular rail, the gripper switches between rigid (aluminum) and compliant (silicone) modes, obviating the need for auxiliary actuators or intricate control systems. Two distinct jaw configurations were modeled and simulated in SolidWorks to validate their feasibility. Simulation experiments confirmed effective stiffness adaptation, with comparative analysis highlighting trade-offs in grip stability and deformation tolerance. The results demonstrate a material-driven approach to hysteresis-free stiffness modulation, simplifying design while ensuring precision for manipulating delicate or rigid object. By replacing traditional dynamic-control paradigms with reconfigurable material interfaces, this work advances microgripper technology, offering scalable solutions for biomedical, semiconductor, and microassembly applications.
Racing aerodynamics is a core research area of modern racing engineering. It reduces air resistance and increases downforce by optimizing airflow management, thereby enhancing the speed, stability and maneuverability of the racing car. In recent years, Computational Fluid Dynamics (CFD) and wind tunnel experimental technology have been widely used in racing aerodynamic research, helping teams in events such as F1, Le Mans and Formula E to optimize the team streamline design and the angles of the front and rear spoiler panels to achieve the best balance between straights and curves. In addition, the application of active aerodynamic systems (such as F1’s variable damping system DRS) and closed wheel design in the team further optimizes the final layout and improves the performance of the car. This study reviews the development of racing aerodynamics, analyzes the latest technologies in drag reduction and downforce management, and explores the potential application of artificial intelligence (AI optimization) in aerodynamic optimization. In the future, AI-driven intelligent aerodynamic adjustment and adaptive aerodynamic structure will become an important direction of racing aerodynamic research to improve the role of racing cars under different models and environmental conditions.
With the rapid advancement of industrial automation, PID control systems have become essential tools in industrial control, prized for their simplicity and robustness. This paper examines six classic methods for implementing PID controllers: analog computers, digital systems, embedded systems, FPGAs, PLCs, and intelligent hardware. It compares their technical characteristics in terms of real-time performance, accuracy, flexibility, and cost, while also highlighting their evolution trends and application limitations. The results reveal that while analog computers offer millisecond-level response times in high-speed scenarios, their performance is limited by parameter fixation and insufficient accuracy. Digital controllers provide ±0.05% accuracy through discrete calculations, although their performance is constrained by sampling cycle delays. Embedded systems dominate the Internet of Things with their 10μW ultra-low power consumption and modular architecture, but face computing bottlenecks in multivariable control. FPGAs offer 99.999% reliability in applications such as lithography positioning, thanks to their nanosecond parallel processing capabilities, though their development cost is high. PLCs, with an MTBF of 500,000 hours, have become the preferred choice for harsh industrial environments, but are limited in terms of algorithm innovation. Intelligent hardware enhances parameter self-tuning efficiency by 60% using AI, but still faces bottlenecks in data quality and computing power. The study outlines key PID challenges: balancing accuracy, adaptability, and intelligence with system constraints. Major advances are anticipated in meta-learning-based tuning, heterogeneous computing, and digital twin verification.
As an important part of promoting social development, exploration activities are inevitably accompanied by certain risks in extreme environments or high-risk areas where exploration tasks are carried out. In order to reduce the threat to personnel safety in complex environments and improve the efficiency of exploration, the application of robotic technology can effectively enhance the robotic adaptability and flexibility in complex environments. In the Bioinspired Continuum robot with programmable stiffness designed for the trunk-like structure, the Intelligent Spring with Programmable Stiffness (ISPS), as a key element in the Cable-driven Continuum Robot (CCR), exhibits an excessively low bending speed during individual simulation tests. Therefore, this study proposes combining the nested Halbach cylindrical array structure with the CCR structure. Additionally, by installing small magnetic beads on the ISPS, it is proposed to enhance the bending efficiency of the ISPS through the action of magnetic force, thereby accelerating the bending efficiency of the robot to achieve higher usage efficiency in complex exploration environments. In this study, through the prediction of the data size of the equipment and the simulation calculations in the formulas, it is concluded that the device can generate a variable magnetic field and apply an additional magnetic force to a single ISPS. As a result, it is practically feasible to accelerate the bending efficiency of the ISPS. This innovation provides a practical improvement scheme for similar bionic robots in terms of increasing the bending speed and thus enhancing the exploration efficiency.
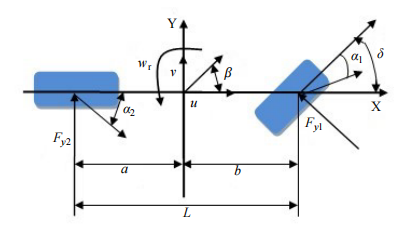
With the global economic development and technological advancement, electric vehicles (EVs) have emerged as a key trend in the automotive industry due to their zero-emission advantage. However, handling stability issues in high-power EVs have become increasingly critical. This study focuses on torque distribution strategies for four-wheel independently driven distributed systems, aiming to enhance vehicle stability and safety by optimizing yaw and sideslip control.A MATLAB simulation model was developed to compare three strategies: no control, average torque distribution, and optimal control. The optimal strategy minimizes the sum of squared tire load ratios under total driving force and yaw moment constraints, using Lagrangian multipliers to derive torque allocation formulas. The average strategy evenly distributes torque while adjusting lateral differences via yaw moments.Simulations based on a linear two-DOF vehicle model and parameters (e.g., mass, wheelbase) under sinusoidal and delayed sinusoidal steering inputs show that the optimal strategy significantly reduces yaw and sideslip angles at 20–30 m/s, with sideslip optimization (93%–99%) and yaw angle reduction (58%–72%) outperforming other methods. At 10 m/s, while yaw angle RMS improvement is limited, sideslip control remains effective.The study confirms that the optimal torque distribution strategy enhances vehicle stability and handling under most conditions by dynamically optimizing wheel torques, providing a theoretical and simulation-based foundation for distributed drive control design.

The National Aeronautics and Space Administration proposes that in the process of changing the civil aviation driving mode from Dual-Pilot Operation to Single-Pilot Operation, the problem of pilot workload assessment needs to be solved. To address this problem, the first need is to realize high-precision real-time detection of pilot behavior. In this paper, based on multi-source heterogeneous data, we realized the pixel-level weighted fusion of multiple sets of differentiated weights, proposed an improved pilot behavior detection model on the basis of YOLOv8m-pose, and carried out the model evaluation in the two dimensions of operation speed and detection accuracy, on the mixed behavioral dataset, the proposed model achieves a mAP@0.5:0.95 improvement of 208.7% over original model, with a detection speed of 39 FPS. It enables high-precision, real-time pilot behavior detection, providing partial theoretical support for Single-Pilot Operation workload assessment.