

1. Introduction
To better understand the context of these advancements, it's important to first define quadruped robots. Quadruped robots, which mimic the movements of animals like dogs and goats, have become increasingly popular in recent years. These robots employ advanced adaptive control systems to navigate complex environments and handle various loads, allowing them to adjust their movements in real-time based on environmental feedback. A key concept in this field is the Center of Mass (CoM), which affects a robot's balance and stability, especially when carrying different weights.
Researchers have developed adaptive control algorithms that allow robots to adjust their movements based on real-time feedback. This enables them to perform better on challenging terrains or when facing unknown loads. In this paper, delve deeper into recent advancements in adaptive control technologies for quadruped robots, analyzing important studies and their contributions to provide a comprehensive overview of the field's current state and future directions.
2. Adaptive control in bionic quadruped robots
2.1. Working principle of bionic quadruped robot
The working principle of the bionic quadruped robot is to imitate the movement mechanism of organisms, combine advanced control algorithms, kinematic analysis and gait planning, and can achieve high-load, high-maneuverability dynamic gait walking, and show excellent movement performance in complex environments.
2.2. Application of adaptive control technology in bionic quadruped robot
Fu Zhang et al. drew inspiration from goats, utilizing their anatomical features as a blueprint to design the mechanical structure of a quadruped robot based on bionic principles [1]. They used the Denavit-Hartenberg (D-H) method to establish the robot's kinematic model and calculated forward and inverse kinematics, laying the foundation for the robot's control theory. In terms of gait planning, the researchers used a low-contact, compact foot trajectory planning method using high-order polynomial curves to plan the robot's foot trajectory in the swing phase and support phase. The MATLAB simulation results show that the robot's foot trajectory is semi-elliptical. This finding is significant because it is basically consistent with the previous goat ramp walking test results, thereby verifying the rationality of the foot trajectory planning. Based on the previous research, the researchers conducted gait planning and obtained the robot's leg-lifting sequence. The research team built a test platform. The experimental results showed that the errors of the robot's leg height and step length were 5.28% and 5.33%, respectively, which were in line with the expected goals, verifying the effectiveness of the designed gait planning scheme. The robot’s knee joint can flex and extend within a range of approximately 126° to 156°, while the hip joint moves between about 104° and 138°. These ranges closely match the natural gait of goats, demonstrating the effectiveness and rationality of the mechanism design.
Mingying Li et al. proposed a new design of parallel quadruped robot and its intelligent control system [2]. The robot adopts a five-link leg structure, imitating the diagonal gait of dogs, with each leg having two degrees of freedom. The authors established a kinematic model based on the D-H method and analyzed the relationship between the foot position and joint angle. At the same time, the author also designed a foot trajectory planning method to reduce the impact of movement. In addition, in order to achieve high precision and stable gait of the robot, the author designed a cascade PID control system and an adaptive fuzzy PID control system. To fine-tune the controller parameters, the researchers employed the sparrow search algorithm. The Sparrow Search Algorithm (SSA) is an optimization technique inspired by the foraging and anti-predation behavior of sparrows. Through MATLAB/ADAMS joint simulation, results show that the adaptive fuzzy PID control system based on sparrow search algorithm optimization has higher accuracy and stability than the cascade PID control system. The external loop of the cascade PID controller is a position closed loop, and the inner loop is velocity closed loop as presented in Figure 1.
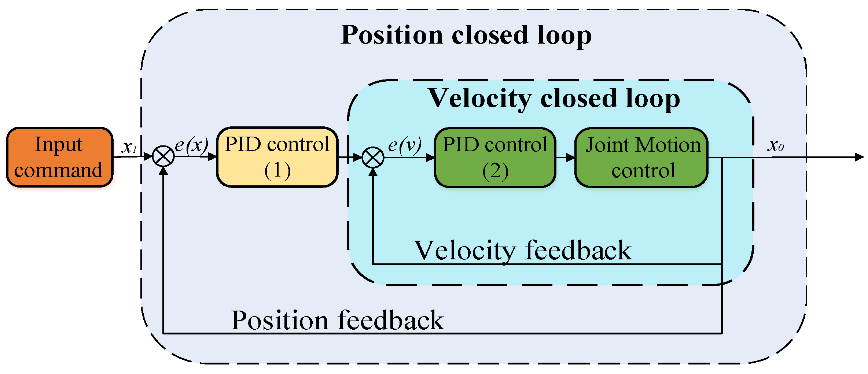
Figure 1: Cascade PID controller control block diagram [2]
Sai Gu et al. proposed a control method based on active adjustment of the quadruped robot's state to improve its anti-interference ability and environmental adaptability [3]. Specifically, this article first designs a controller framework based on the physical model of the quadruped robot and uses the quadratic programming (QP) method to optimize the foot-end force. Then an active disturbance compensation method based on kinetic analysis is proposed and combined with the controller to achieve active disturbance recovery. At the same time, based on the laws of biological movement, the article put forward an active environmental adaptive control method, which achieves balance control in complex environments by actively adjusting the robot's posture and leg swing trajectory without the need for additional perception or visual information. The experimental results demonstrate the robot's versatility across various terrains. When navigating through grass, gravel, slopes, and other challenging environments, the robot showcases its ability to actively adjust both its posture and leg swing trajectory, thereby maintaining optimal balance and movement performance.
Another article published by Sai Gu et al. mentioned an adaptive control method for a quadruped robot to carry unknown static loads and achieve human-robot interactive actions [4]. In this paper, a quadruped robot motion controller that considers the actual Center of Mass (CoM) position is proposed, which enables the robot to carry unknown loads and adapt online to real-time CoM position changes. Experimental results show that the proposed CoM identification and control method can quickly detect and adjust the position of the CoM. This ensures that the robot maintains a stable motion state even when carrying an unknown load. Besides, a human arm model is established to infer the positive and negative effects of the human, and mitigate negative external disturbances through adaptive control methods while taking advantage of possible positive contributions. In the human-computer interaction experiment, compared with the traditional control method, adding adaptive control can improve the stability of the human-computer interaction process. Adaptive control responds more actively in the case of obvious interference, can effectively alleviate the influence of external forces, and make the whole motion process smoother.
Similar to the research by Sai Gu et al., CHAO DING et al. proposed an adaptive gait control method for quadruped robots [5]. This method can automatically adjust the control strategy to maintain stable movement. It adapts to changes in the robot's Center of Mass (CoM) and load. Specifically, the method can dynamically estimate the robot's CoM position in real time and correct CoM offsets using model predictive control (MPC). It also incorporates techniques to detect and adapt to changes in load mass, ensuring stable performance. Simulation results show that this method can enable the robot to adapt to changes in CoM and load without interrupting gait and significantly reduce state tracking errors. The paper conducted a sensitivity analysis on the accuracy and reliability of CoM estimation, and the results showed that the method is robust to sensor noise. In addition, under load changes, the method can accurately identify the load mass, and the error is usually within 8%.
Bingchen Jin et al. developed an adaptive control algorithm called ACQL (Adaptive Controller for Quadruped Locomotion) [6]. This algorithm addresses the motion control challenges of a high-load-capacity quadruped robot operating under unknown load conditions. The algorithm uses an online load identification method to estimate the external torque and force and incorporates them into a quadratic programming controller based on inverse dynamics to improve the tracking accuracy of the robot's center of mass and posture trajectory. The experiment was verified on a quadruped robot platform called Kirin, and the results showed that this method can effectively identify and adaptively control loads ranging from 20kg to 75kg. Statistical results demonstrate that ACQL can quickly converge and operate efficiently in real-time. This indicates that the algorithm is effective in handling loads with unknown weight or position. In addition, the experiment also verified that when the ACQL load is equal to the robot's own weight, the robot can still maintain good in-place jumping performance.
Wang Lei and colleagues introduced an innovative parallel quadruped robot design coupled with a dynamic gait control method [7]. Their approach achieves terrain adaptability without the need for explicit perception, marking a significant advancement in robotic locomotion. The robot adopts a symmetrical leg structure and high-torque density actuators, which enables flexible dynamic movement on rough terrain. The authors proposed a fast and reliable terrain parameter estimation method based on generalized least squares method, which integrates the robot body, leg and contact force information without the need for additional sensing equipment. The authors also proposed a foot force distribution method based on virtual model control and quadratic programming optimization, which achieves self-adaptation to uneven terrain. This method can solve the optimal foot force distribution solution within 0.15ms and meet the constraints of friction cone and joint torque. Simulation results reveal a significant advantage of the symmetrical leg structure. Compared to both serial and parallel leg structures, the robot with symmetrical legs can generate larger ground reaction forces while using the same actuator torque. Additionally, the robot uses a customized two-stage planetary gear reducer, which greatly improves the torque density of the actuator. As shown in Figure 2, the controller, driver, and battery were all located in the center of this robot.
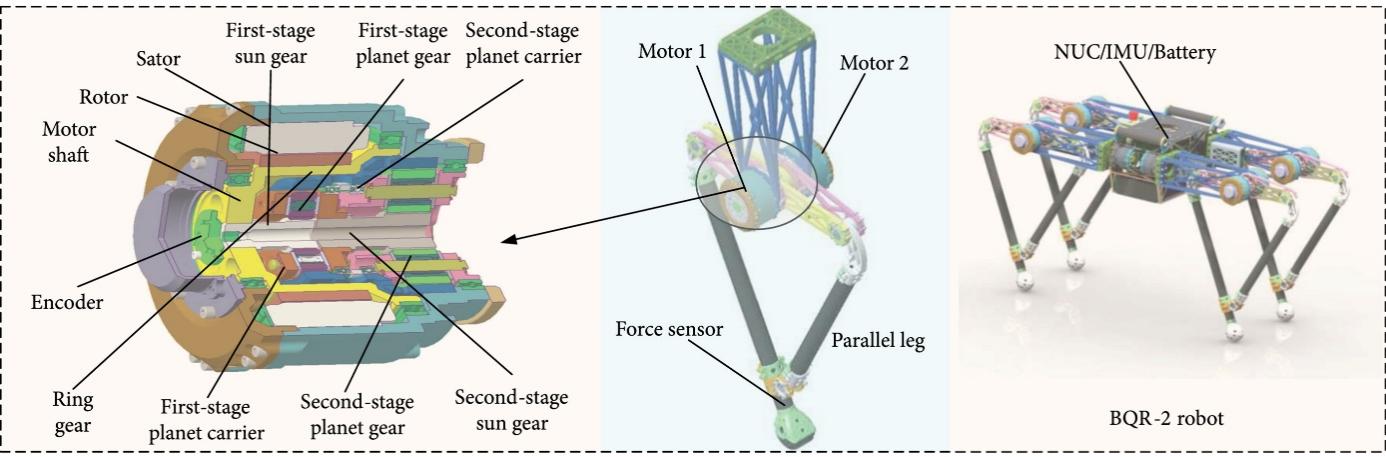
Figure 2: Actuator, leg and robot design with a symmetric topology, and the actuator designed with a custom two-stage planetary reducer [7]
Shifting focus to another innovative approach in quadruped robotics, Xiaolong Quan et al. introduced an efficient closed-loop adaptive controller [8]. This controller was specifically designed for SQuRo, a small quadruped robot, marking a significant step in compact robotic systems. In a remarkable feat of minimalist design, the controller relies solely on an inertial measurement unit (IMU) sensor for attitude estimation and control. This streamlined approach significantly reduces computational demands, paving the way for more efficient and responsive robotic systems. It includes a state detection module and an adaptive movement generation module. The state detection module can identify situations such as falls, complex terrain, ramps and collisions, while the adaptive movement generation module selects appropriate pre-optimized motion patterns to deal with these situations. This approach avoids the need for real-time motion optimization, thereby achieving efficient control. Experimental results show that SQuRo demonstrates strong motion capabilities in a variety of challenging environments, including ramp stability, linear tracking, autonomous fall recovery, walking on uneven terrain, walking on ramps, and obstacle avoidance. For example, SQuRo is able to maintain stable walking on a 15° slope, and by detecting the pitch angle change in the IMU signal, it can switch from straight walking to crawling mode to adapt to the slope environment. Figure 3 illustrates the kinematic model of SQuRo. In part (A), the coordinate system of SQuRo is shown, detailing how the robot’s movements are tracked and controlled. Part (B) depicts the robot positioned on a slope before any posture adjustments, highlighting its initial stance. Part (C) shows the robot after it has adjusted its posture, demonstrating the effectiveness of the control method in maintaining stability on uneven terrain.
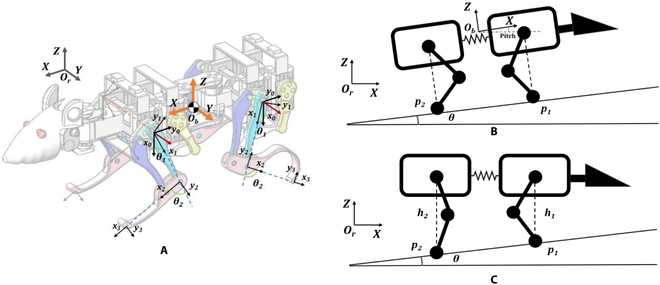
Figure 3: The kinematic model of SQuRo. (A) The coordinate system of SQuRo. (B) The robot on the slope before posture adjustment. (C) The robot on the slope after posture adjustment [8]
3. Conclusion
In conclusion, this review highlights important advancements in adaptive control technologies for bionic quadruped robots. The discussed studies show various methods to enhance robot performance and stability under different conditions, including kinematic models and advanced control algorithms.
Looking ahead, future research should focus on developing more sophisticated adaptive control techniques. This includes improving real-time responsiveness and robustness against environmental challenges. Integrating artificial intelligence and machine learning could also enhance adaptability, allowing robots to learn from experiences.
By building on existing knowledge and exploring new technologies, researchers can create more capable and efficient quadruped robots for applications in areas such as search and rescue, agriculture, and environmental monitoring. These advancements promise to significantly expand the capabilities and applications of quadruped robots, potentially revolutionizing various industries and improving human life in numerous ways.